|
“综合冠军”机器鱼浮出水面中国科学报 2021-05-25 作者:张双虎 |
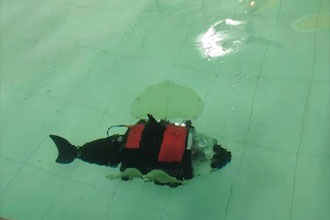
在中科院自动化所机器鱼实验室宽大的水池中,一条黑色的“大鱼”乌木般静静浮在水面。“大鱼”长约70公分,通体黑色,浅黄色半通明的鱼鳍几乎融入水池背景中。
随着工作人员在键盘上敲下几行指令,“大鱼”瞬间满血复活。它宽大的胸鳍拍打着水面“啪啪”作响。几秒后,大鱼没入水中,开始在水下游动、翻转、定深。
这是中科院自动化所复杂系统管理与控制国家重点实验研究员王硕团队在测试最新研制的仿生机器鱼——仿豹鲂鮄机器鱼(RobDact)。RobDact拥有一对波动长鳍与一个大功率双关节尾鳍,可实现原地旋转、浮潜以及狭窄的空间内自由运动。它同时具有一定载荷能力,具有良好的环境友好性、机动性和运动稳定性。
“综合冠军”面世
“它(RobDact)是个‘综合冠军’。”王硕告诉《中国科学报》,“我们以前也做过几款仿生机器鱼,如仿鳐鱼、仿海豚等,相对于尾鳍推进的机器鱼,仿豹鲂鮄机器鱼在推进速度和快速机动方面并非最好,但它胜在综合性能上,兼顾了速度和垂直、水平方向的位姿控制精度,具有较好的推进性能和低速姿态稳定控制的能力。”
该团队成员、中科院自动化所复杂系统管理与控制国家重点实验副研究员王睿介绍说,RobDact在姿态的稳定性上,采用像鳐鱼那种鳍的推进方式,两侧有比较大的胸鳍,能让它在水下很好的保持姿态的稳定性。
“以前的机器鱼在水下必须一直保持运动状态,如果要观察某个特定点,必须像卫星一样,绕着目标不停转圈才能看清。一旦水下有些扰动,它就会偏离方向、失去目标,要再游一圈才能把头转回来重新对焦。”王睿对《中国科学报》说,“RobDact可以靠两侧鳍的上下左右摆动来调整位置,始终把要观察的目标定在视野当中,做到定点悬停。”
“和我们平时拍照一样,相机拿得稳,拍出来的照片才清晰。”王硕说,“在进行水下研究时,如果携带相机的机器鱼能够定点悬停,就相当于我们拿相机的手不抖就了,它拍出的照片就会更清晰。”
仿生的魅力
王硕介绍说,在亿万年的自然选择过程中,鱼类进化出了非凡的水中运动能力。仿生机器鱼建立在将鱼类的推进运动简化为理想条件下,鱼类身体连续的、周期性的形变基础之上。
而通过鱼类运动的观察和仿生机器鱼游动试验,中科院自动化所复杂系统管理与控制国家重点实验研究员谭民等研究人员发现鱼体质心在水平面内绕前进方向轴的波动将增大侧向扰动力、降低推力和方向稳定性,即鱼类自身线密度分布对其运动性能存在较大影响。因此,提出了包含形变描述和线密度描述的“基波”概念,并依据“基波”建立了鱼体波动运动模型,在充分考虑线密度影响的基础上,提出了仿生机器鱼的稳定游动推进控制方法,为仿鱼机器人的设计和控制奠定了理论基础。
20多年来,王硕团队研制出了一系列应用于不同场景的机器鱼。他们研制的仿生鳐鱼借鉴了鳐鱼的推进结构,并挂载了一个轻量的机械臂,可以抓取物体。
2018年,仿生鳐鱼参加獐子岛水下机器人大赛,下海抓取海参、海胆、扇贝等,经过一番角逐,团队取得了目标识别在线组第一名,定点抓取组三等奖的成绩。
2019年,该团队研制的仿生鲤鱼能依靠身体各个关节的协调配合,在水中灵活游动,并将采集到的水质参数(PH值、温度、电导率等)实时上传。
“传统的机器鱼也能实现悬停,但一般会通过水箱方式,或者动力方式(螺旋浆推进)来实现悬停。前者需要很大的水箱进行抽水排水,后者必须在运动当中,通过实时舵面调整才能保证在一定深度上维持悬停的推力,所以它必须不断运动。因此都面临位姿、速度等实时控制问题。”王硕说,“此外,靠螺旋浆推进或下潜的机器鱼在运动时,螺旋桨会伤害鱼类或其他水底生物。仿生机器鱼用类似鱼鳍的结构作为动力,这种结构一是不会对水下动物造成伤害,二是可以靠近鱼类进行研究。”
在自然界中,豹鲂鮄拥有一对灵活的翅膀与有力的尾巴,这让它既可以灵活稳定地低速游动,又可以大范围地快速运动。受豹鲂鮄运动方式的启发,研究人员为RobDact设计了两个胸鳍,从而实现垂直方向的下潜,水平方向转弯和在一定深度上定深悬停。为保证RobDact有较好的推进性能,研究人员还给它设计了尾鳍,通过尾鳍摆动,保证它在向前游动时,有比较理想的速度。因此,RobDact可以狭窄或危险水下环境中作业,具有重要的研究价值和应用前景。
实现更好的综合性能
“这款机器鱼可通过遥控和带缆线水下作业两种方式工作,也可以事先给它定一个目标,让它在水下独立完成后浮出水面。”王硕说,“目前仿生鱼在结构设计上还有很多困难亟待克服,比如,很难把不同类型鱼的优点整合到一种机器鱼身上。”
目前,RobDact的设计负载是两公斤,根据载荷的不同,可以实现对目标的识别、监测、躲避和抓取。
王硕介绍说,豹鲂鮄经常在砂泥质海底游动,长期对环境的适应让它有很好的机动性,如果遇到捕食者,它可以很快地在复杂环境里穿行规避。如果在开阔水域,它也有不错的速度。尽管RobDact的机动性、姿态控能力大大提升,但鳍面比较大,这也增加了它前进的阻力。
“机器鱼设计要综合考虑体积、外形,重量等因素,在尽可能减轻重量的同时保持整体平衡。还要考虑它工作的时长,传感器如何来配置,如何更好地水下通信等问题。”王硕说,“下一步我们会考虑如何把它的鳍做成可伸缩结构,当需要调整姿态或悬停时就伸出来,需要游动起来的时候把它收起来,从而更好地提高综合性能。”
责任编辑:刘鑫嵘
上一篇:“仿生飞鱼飞机”飞上天
下一篇:动态细节揭示病毒对植物的感染周期
 科普中国APP
科普中国APP
 科普中国微信
科普中国微信
 科普中国微博
科普中国微博







最新文章
-
为何太阳系所有行星都在同一平面上旋转?
新浪科技 2021-09-29
-
我国学者揭示早期宇宙星际间重元素起源之谜
中国科学报 2021-09-29
-
比“胖五”更能扛!我国新一代载人运载火箭要来了
科技日报 2021-09-29
-
5G演进已开始,6G研究正进行
光明日报 2021-09-28
-
“早期暗能量”或让宇宙年轻10亿岁
科技日报 2021-09-28
-
5G、大数据、人工智能,看看现代交通的创新元素
新华网 2021-09-28




